Bibliographie
Parmi les nombreux livres sur le sujets, ceux-ci sont à la fois accessibles et précis :
Martinez P. et Klotz A. (1994) Le guide pratique de l’astronomie CCD. Adagio.
Howell S. B. (2000) Handbook of CCD astronomy. Cambridge.
Les notes suivantes sont en partie inspirées de ces livres. Dans les grandes lignes, elles s'appliquent aux images numériques en général, quel que soit le type de matrice utilisé, aussi bien en infrarouge qu'en visible.
Ces applets chez Hammamatsu sont très instructives, et permettent de visualiser les phénomènes abordés ici.
Les documentations des instruments installés sur les grands télescopes sont également pleines d'information, plutôt techniques (e.g. à La Silla).
Les détecteurs couramment employés en astronomie sont des dispositifs à transfert de charge (CCD). Il s'agit de matrices de détecteurs photo-sensibles qui accumulent des charges électriques en proportion de la lumière qu'ils reçoivent. Historiquement, seuls les CCD monochromes (N&B) étaient utilisés pour l'observation. Dans le domaine amateur, on utilise de plus en plus des capteurs dérivés de ceux des appareils photo ou des caméras grand public, en couleurs ; ces systèmes provoquent des pertes soit en résolution, soit en sensibilité, et ne sont pas utilisés sur les grands télescopes.
Caractéristiques géométriques
Les CCD actuels sont constitués de sites photosensibles (ou photosites) disposés selon une matrice à deux dimensions. Chaque photosite effectue une mesure de luminosité élémentaire et indépendante (pixel). Lorsqu'on affiche l'image résultante sur un écran d'ordinateur, on fait normalement correspondre les pixels du capteurs à ceux de l'écran.
Les tailles des matrices sont données en nombres de pixels, qui définissent la résolution des images pour un champ de vue donné. Les premières matrices disponibles avaient des tailles typiques de 340 x 280 pixels ; les plus grandes matrices actuelles vont jusqu'à 8000 x 8000 pixels et peuvent être utilisées en groupe.
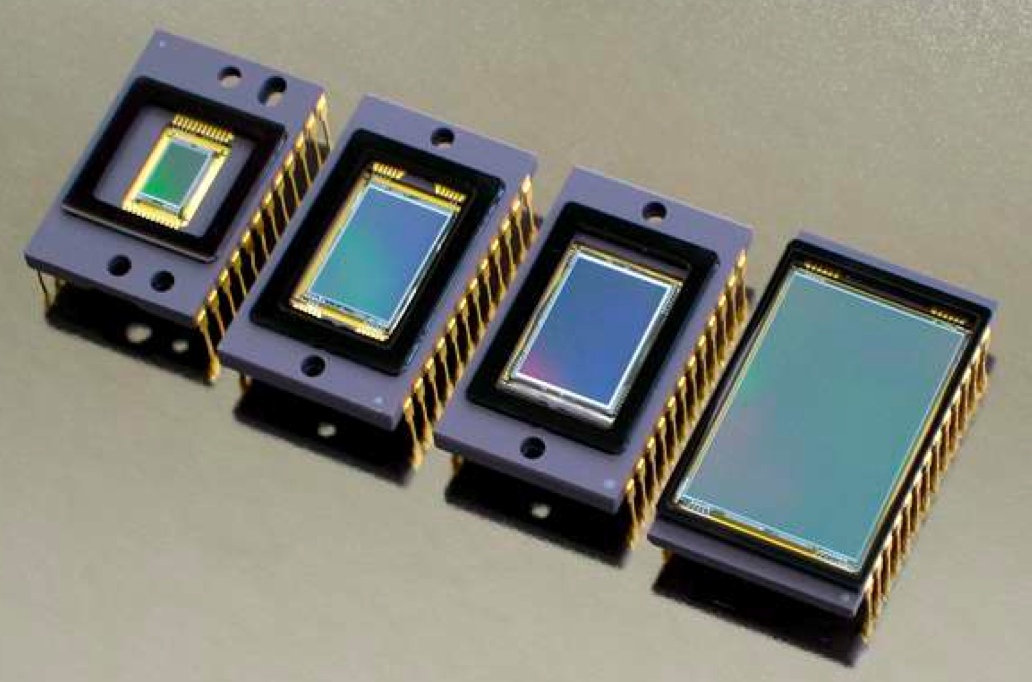
Série de capteurs CCD Kodak (768x512 à 3072x2048)
Les pixels eux-mêmes ont des tailles variables selon les modèles, de 6 à 40 µm (distances entre centres des pixels). Les pixels ne sont pas toujours carrés, ce qui peut causer une déformation lors de l'affichage des images sur écran (dont les pixels sont équidistants).
La surface photosensible est légèrement plus petite que la surface totale des pixels. Si la différence est importante, elle causera des zones aveugles dans l'image. Deux types de CCD ont des pixels disjoints : ceux qui sont munis d'un dispositif anti-éblouissement, et ceux qui fonctionnent en transfert interligne.

Agrandissement de la zone sensible d'un CCD
Lecture des matrices
L'éclairement de la matrice provoque l'accumulation de charges électriques dans chacun des photosites. La lecture consiste à amener ces charges en séquence vers la broche de sortie du CCD, où l'on mesure un courant de sortie. Cette opération vide tous les photosites de leurs charges, et les réinitialise pour la pose suivante.
Dans un CCD pleine trame (« full frame »), les charges sont déplacées vers la sortie à l'aide de signaux d'horloge (produits par une électronique de commande). Il y a deux types d'horloges :
- celles qui décalent toutes les lignes d'un cran ; la dernière ligne est décalée vers une ligne supplémentaire masquée à la lumière (registre horizontal) ;
- celles qui décalent le registre horizontal d'un cran vers la sortie du CCD (registre de sortie).
Schéma d'une matrice
Lecture schématique de la matrice
Caméra et chaîne d'acquisition
A chaque décalage, la tension de sortie est lue et amplifiée par un étage analogique, puis convertie en signal numérique. Cette étape utilise un convertisseur analogique-numérique, qui échantillonne le signal et retourne des valeurs discrètes. Un arrondi est donc effectué à ce moment, ce qui introduit un bruit supplémentaire (voir plus bas).
La caméra CCD complète est un boîtier contenant le capteur proprement dit et ses horloges, l'ampli de sortie, le convertisseur analogique-numérique, et éventuellement un système de refroidissement, un porte-filtre et un obturateur.
Schéma de principe d'une caméra astronomique
Pour l'observation, une telle caméra est placée au foyer d'un télescope et le signal de sortie, numérisé, est recueilli directement sur un ordinateur. Celui-ci sert à la fois au pilotage de la caméra et à l'analyse des images.
Chaîne d'acquisition télescopique
On se souviendra que l'image formée par le télescope n'est pas une reproduction fidèle de l'objet : l'image d'un point est une tache d'Airy dont la dimension angulaire dépend du diamètre collecteur et de la longueur d'onde. Par ailleurs, la turbulence atmosphérique dégrade les images de façon encore plus importante (voir plus loin). Pour préserver la résolution fournie par le télescope, on doit échantillonner correctement la tache d'Airy (2 pixels minimum dans le lobe central).
Acquisition d'images
Les charges s'accumulent dans les photosites proportionnellement à la quantité de lumière reçue ; des charges supplémentaires (charges thermiques) s'accumulent spontanément même en l'absence de lumière. Les sites sont vidés au cours d'une lecture.
Avant de lancer une nouvelle acquisition, on lit la matrice une ou plusieurs fois pour vider les charges thermiques. Cette lecture est très rapide, car on ne mesure pas les courants de sortie. La pose (acquisition) correspond à l'arrêt des cycles d'horloge : les charges s'accumulent pendant un temps donné. En fin de pose, on reprend les cycles d'horloge pour transférer et mesurer les charges.
Cette lecture peut être assez longue (quelques secondes), et durant la lecture les charges continuent à s'accumuler sur l'image en cours de décalage. Ce signal parasite est plus important pour les lignes lues en dernier, c'est à dire les lignes situées en haut de l'image. Si le temps de pose n'est pas très long devant le temps de lecture, ceci produit une traînée vers le haut de l'image (smearing). C'est souvent le cas pour les images planétaires.
On résout ce problème de deux façons différentes :
-
soit en disposant un obturateur électronique devant la caméra. Il est
ouvert au début de la pose, et refermé avant le début de la lecture
pour protéger la matrice ;
- soit en transférant la partie
utile de la matrice dans une zone protégée de la lumière. Ce transfert
est extrêmement rapide et ne provoque donc pas de smearing.
Ce type de transfert peut être effectué de plusieurs façons :
- avec
une matrice à transfert de trame (« frame transfer »). La
zone image est décalée vers une zone mémoire de même dimension à la fin
de la pose. Le décalage est beaucoup plus rapide que la lecture,
puisqu'il suffit de décaler en lignes, sans décaler le registre
horizontal et sans lire les pixels ; ce temps de décalage est tout
de même de l'ordre de quelques ms, et n'est pas forcément négligeable
devant le temps de pose pour les objets brillants (planètes en
particulier) ;
- en n'utilisant que la moitié
supérieure d'une matrice pleine trame (transfert de demi-trame). On
décale très rapidement la matrice de la moitié de sa taille, puis on la
lit. Ce fonctionnement n'est possible que si la partie inférieure du
champ ne contient pas de source brillante ; il n'est pas
utilisable pour les planètes ou les objets étendus. Il a également
l'inconvénient de sacrifier la moitié de la taille de la matrice ;
- avec une matrice à transfert d'interligne (« interline transfer »). Ces matrices possèdent une ligne mémoire protégée à côté de chaque ligne sensible, et produisent donc des zones mortes importantes dans les images finales.
Modes de lecture particuliers
En dehors de la lecture complète de la matrice, deux modes de lecture utiles et peuvent être utilisés à l'aide de signaux d'horloges particuliers :
- Le mode fenêtrage qui permet de ne lire qu'une zone réduite de la matrice. L'intérêt est d'augmenter la cadence d'acquisition des images pour certaines situations : phase de mise au point du télescope (sur un détail de l'image), suivi d'événements temporels rapides (occultations…).
- Le binning consiste à additionner les charges de plusieurs photosites durant la lecture, donc avant conversion numérique. L'intérêt par rapport à une opération de moyennage numérique sur l'image complète est de réduire le bruit de lecture, et d'augmenter la vitesse d'acquisition. Le binning s'accompagne évidemment d'une perte de résolution, acceptable (voire souhaitable) pour les objets faibles, les phases de mise au point ou la spectroscopie.
Caractéristiques électroniques
La sensibilité du CCD s'exprime couramment en nombre d'électrons produits par photon incident. Cette quantité s'appelle rendement quantique équivalent (RQE, « quantum efficiency »). Elle atteint actuellement des valeurs de 80% pour les CCD, contre 5% typiquement pour une émulsion photographique classique.
Cette sensibilité varie avec la longueur d'onde. Le maximum de sensibilité est situé vers 0,6-0,7 µm (dans le rouge) ; le domaine sensible va de 0,45 à 1,0 µm sur les CCD récents. Cette sensibilité peut être étendue vers les courtes longueurs d'onde de deux façons différentes, soit en superposant une couche fluorescente, soit en éclairant par l'arrière un CCD aminci.
Les matrices IR actuelles, qui utilisent d'autres matériaux, couvrent le domaine du proche IR (1 à 6 µm).
Sensibilité spectrale pour différents types de CCD
La capacité des pixels, ou profondeur des puits, est le nombre de charges que peut contenir un photosite. Elle est liée à la taille des pixels, et varie de 50 000 à 1 000 000 électrons selon les modèles. C'est le rapport de la capacité au nombre d'électrons générés de façon aléatoire (le bruit) qui détermine la qualité du signal ; on obtient couramment des dynamiques de l'ordre de 10 000 avec les CCD. Une grande capacité favorise l'observation d'objets brillants (notamment les planètes) : elle permet des temps de pose plus longs, et donc de réduire le bruit de photon.
La saturation de certains photosites se traduit par des traînées brillantes le long des colonnes (les électrons excédentaires contaminent les sites voisins ; l'effet est renforcé par une traînée de smearing vers le haut de la colonne pendant le transfert des lignes). Un dispositif anti-éblouissement (« anti-blooming ») peut limiter ce phénomène en évacuant les électrons excédentaires durant l'intégration ; ce type de dispositif conduit par principe à une perte de linéarité dans la moitié supérieure de la dynamique du signal de sortie. Il empêche donc d'utiliser les mesures pour faire de la photométrie, mais favorise l'imagerie de scènes à très fort contraste.

Saturation sur une image à long temps de pose (blooming)
La linéarité des CCD est très bonne : le nombre de charges produites est presque exactement proportionnel au flux reçu, même pour les flux faibles et les temps de pose courts. Ceci permet l'addition d'images pour les objets faibles, et la mesure photométrique directe sur les images. C'est une différence importante avec les émulsions photographiques, dont la réponse est essentiellement logarithmique.

Courbes de réponse d'un CCD et d'une émulsion photographique
L'efficacité de transfert est de l'ordre de 0,99999, ce qui signifie que 1 électron sur 100 000 sera perdu au cours du transfert et pourra contaminer les pixels suivants durant la lecture. Le bruit ainsi généré est plus important pour les pixels lus en derniers, c'est à dire pour les lignes situées en haut de l'image. L'efficacité de transfert augmente avec la durée du cycle de lecture, et conditionne la durée de lecture des pixels individuels (quelques µs).
Le courant d'obscurité est pour l'essentiel dû aux charges générées spontanément lorsque la matrice n'est pas éclairée (charges thermiques). Pour un pixel donné, il est proportionnel au temps de pose et le coefficient de proportionnalité ne dépend que de la température. Ce signal additif est donc reproductible, à la dispersion statistique près (bruit thermique). Ce courant doit être limité autant que possible, d'une part pour éviter la saturation intempestive des photosites, d'autre part pour réduire le bruit associé. On le limite très efficacement en refroidissant le CCD à des températures de l'ordre de -100°C (circulation d'azote liquide), ou à défaut avec des dispositifs électriques (modules Peltier). Le nombre d'électrons thermiques générés par seconde est typiquement de l'ordre de 1 à 100 à 20°C ; ce nombre est réduit d'un facteur 2 chaque fois qu'on refroidit de 6°.
On impose de surcroît un biais (ou offset), qui est un niveau de base ajouté au signal de sortie pour le décaler du zéro (on améliore ainsi la linéarité aux faibles flux). On le mesure souvent séparément, bien qu'il soit inclus dans les mesures du courant d'obscurité.
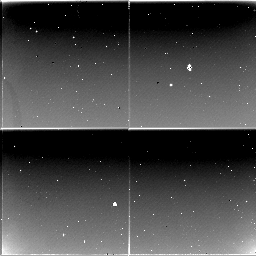
Un autre phénomène contribue au courant d'obscurité, l'électroluminescence de l'amplificateur de sortie. Elle se traduit par une augmentation du courant d'obscurité dans un coin en bas de l'image (à côté de la broche de sortie), et génère donc également un bruit.

Effet d'électroluminescence de l'ampli de sortie sur un dark
Les matrices contiennent des proportions variables de défauts : pixels morts (sans détectivité), pixels chauds (qui saturent très vite), pixels froids (non linéaires aux faibles flux). Ces défauts peuvent être isolés, ou apparaître en groupes (clusters), en lignes ou en colonnes. Selon le type d'application, on essaie d'utiliser au mieux les zones zones sans défaut.
Pixels morts d'un détecteur IR (quatre capteurs accolés), visibles sur une image de dark.
Noter les deux clusters de pixels morts groupés.
Signal et bruit
Pour chaque pixel, on fait l'hypothèse que le signal de sortie est une fonction linéaire du flux reçu, ce qui est vrai en très bonne approximation. Le signal produit en sortie du CCD (S) est donc une combinaison linéaire de trois signaux :
S = I . PLU + Dark
où I est l'image formée sur le CCD, PLU est la réponse de chaque pixel de la matrice, et Dark est le courant d'obscurité pour chaque pixel (courant thermique + offset). Les valeurs de S en chaque point sont comprises entre 0 et 2N, où N est le nombre de bits du convertisseur. L'unité de cette grandeur sans dimension est appelée pas-codeur, DN (digital numbers) ou ADU (Analog to Digital Unit).
La PLU et le Dark sont mesurés séparément, mais dans des conditions correspondant à l'image. Le prétraitement (couramment appelé calibration) consiste à reconstituer l'image I formée dans le plan focal à partir de S, avec la meilleure précision possible (on corrige le comportement du CCD et des filtres). La restauration d'image consiste à compenser au mieux les déformations subies par l'image avant formation sur le CCD (notamment celles dues à l'atmosphère terrestre). Les autres traitements (filtrages…) servent à mettre en évidence visuellement l'information intéressante (détails spatiaux, structures...).
Le signal mesuré S est entaché de bruits divers, c'est-à-dire de variations imprédictibles et non reproductibles, non corrélées entre pixels : bruit de lecture, bruit thermique, parasites, bruit de numérisation. La source lumineuse observée est elle-même sujette à des variations aléatoires qui produisent une incertitude sur le flux mesuré (bruit de photons) ; c'est la limite ultime sur la précision de la mesure. Le bruit étant une variable aléatoire, on estime son amplitude à l'aide d'une valeur moyenne (écart-type de la variation associée).
Les sources d'incertitude qui sont liées au comptage de photons ou de charges électriques sont décrites par la loi de Poisson : leur écart-type est égal à la racine carrée du signal mesuré. Le bruit de numérisation et le bruit de lecture se comportent différemment.
Le bruit de lecture (read-out noise) est dû d'une part à l'efficacité du transfert de charges, d'autre part à la précision de l'amplification analogique. Ces deux quantités diminuent quand la vitesse de lecture du CCD augmente. Les CCD présentent typiquement un bruit de lecture compris entre 10 et 100 électrons par pixel. Le bruit de lecture intervient une fois lors de chaque mesure, de façon indépendante ; pour cette raison, la somme de plusieurs images n'est pas équivalente à une seule pose de la durée totale des poses élémentaires.
|
|
(écart-type) |
Rapport signal sur bruit
|
|
| Pose de 1 seconde |
|
|
R = sig / B
|
| Somme de 10 poses de 1 seconde |
|
|
sqrt(10) . R
|
| 1 pose de 10 secondes |
|
|
10 . R
|
Rapport signal sur bruit dans une situation dominée par le bruit de lecture
Le bruit thermique est l'incertitude sur le nombre d'électrons générés spontanément durant la pose et la lecture, qui forment le courant d'obscurité. Ce courant d'obscurité dépend fortement de la température, et varie proportionnellement au temps de pose pour une température donnée. Si N électrons sont générés spontanément, l'écart-type du bruit thermique est sqrt(N) selon la loi de Poisson. Il faut donc réduire le nombre d'électrons thermiques pour réduire le bruit associé, en refroidissant le CCD (voir plus haut).
Les parasites sont une autre source d'incertitude, qui dépend de l'environnement électro-magnétique dans lequel on travaille, et du blindage du CCD. Ils se traduisent le plus souvent par des pixels saturés sur l'image. Les rayons cosmiques, surtout sensibles sur les sites de haute altitude, peuvent également créer des traces sur les images.
Le bruit de numérisation est l'erreur moyenne commise en échantillonnant le signal analogique sur un nombre fini de pas-codeurs. L'écart-type de cette erreur vaut 1/ sqrt(12) en pas-codeurs (dans l'hypothèse ou la conversion se fait sans problème). On a donc intérêt à coder le signal analogique sur un nombre élevé de pas-codeurs, c'est-à-dire à coder le signal sur un grand nombre de bits (le nombre de pas-codeurs est 2N, où N est le nombre de bits du convertisseurs). On choisit le convertisseur pour une caméra donnée de façon à coder le bruit de lecture sur un pas-codeur, ce qui assure que le bruit de numérisation sera plus petit – un échantillonnage plus fin n'améliore pas la précision du signal final. Le nombre de bits requis est donc N tel quel :
2N = capacité / bruit de lecture
Il faut tout de même tenir compte de la précision du convertisseur lui-même, qui n'est pas toujours optimale : des convertisseurs 16 bits peuvent faire des erreurs, et ne fonctionner que comme un 14 bits parfait. Les convertisseurs 12 bits sont le minimum pour rendre compte de la dynamique des signaux astronomiques (codage sur 4096 niveaux).
Le bruit de photon
est une caractéristique intrinsèque à la source observée, qui ne dépend
pas de l'instrument utilisé. La statistique est la même que pour le
bruit thermique : le signal est proportionnel au temps de pose, le bruit est égal à
la racine carrée du nombre de photons reçus. Ce bruit est présent à la
fois dans les sources lumineuses et dans le fond de ciel, à des niveaux
différents. On améliore le rapport signal sur bruit en posant plus
longuement ; cette amélioration est lente, et limitée en pratique
par les temps de pose raisonnables.
Le bruit total (sur l'image non calibrée) est la moyenne quadratique des différents bruits entachant le signal, car ceux-ci sont indépendants. Il s'écrit :
Btotal2 = Bphotons2 + Blecture2 + Bthermique2 + Bnumérisation2
Le
bruit dominant dépend de l'intensité de la source observée et du temps
de pose. Pour les objets faibles, le bruit de lecture (constant) est
dominant aux courts temps de pose, et devient négligeable
devant le bruit thermique quand la pose s'allonge. Pour les sources
brillantes (les planètes en particulier), c'est toujours le bruit de
photon qui domine. Si la caméra est bien réglée, le bruit de
numérisation est toujours négligeable devant le bruit de lecture.