Le signal de sortie d'une matrice CCD est la somme du courant d'obscurité et de l'intensité mesurée sur l'objet, à travers l'atmosphère et l'optique du télescope, convertie en électrons. Le prétraitement, ou calibration, consiste à retrouver une mesure proportionnelle à l'intensité lumineuse incidente, c'est-à-dire l'image formée sur la matrice. La calibration absolue consiste à convertir cette mesure donnée en pas-codeurs vers une mesure en unités d'intensité lumineuse.
Calibration radiométrique
Le signal de sortie s'écrit :
S = I(x,y,t) . r(x,y) + d(x,y,t,T) + b(x,y)
où :
- I(x,y,t) est l'intensité, intégrée pendant le temps de pose t ;
- r(x,y) est la réponse des pixels individuels ;
- d(x,y,t,T) sont les charges thermiques intégrées pendant le temps t, fonction de la température T ;
- b(x,y) est un offset de précharge (biais), constant pour chaque pixel.
On mesure les paramètres r, d, et b au cours de chaque séance d'observation :
Pour b : on fait une pause la plus courte possible, dans l'obscurité. Cette pose donne directement Ib=b. En général, elle est dominée par un motif géométrique lié aux connexions entre colonnes de la matrice.
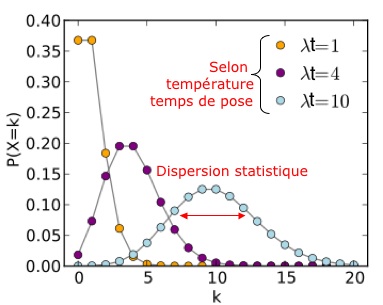
Pour d : on fait une pose de même temps que l'image, dans l'obscurité. Cette pose donne la somme Dark=d+b. La variation avec le temps de pose peut également se calculer, aux fluctuations statistiques près. Il est important de maintenir la caméra à la même température que pendant la pose. Dès que les charges thermiques sont nombreuses (pour les températures élevées où les temps de pose conséquents), le motif du biais est dilué dans une distribution aléatoire.
 |
 |
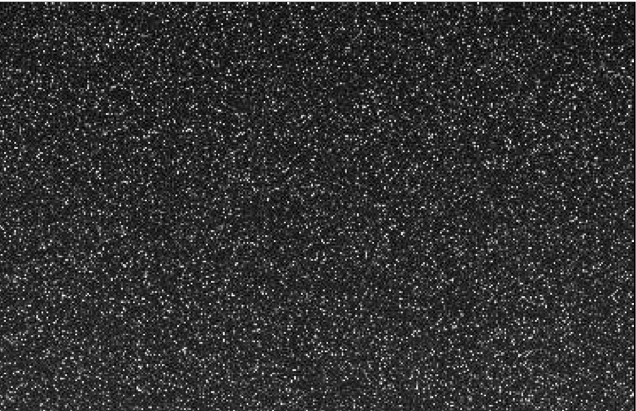 |
En haut une image d'offset b (pose courte); en bas, un dark d+b (pose longue instrument fermé)
A droite, dispersion statistique des charges thermiques selon la loi de Poisson.
Pour r : on fait une pose longue sur le fond de ciel encore éclairé, avec la même mise au point que les images, et à travers chacun des filtres utilisés (il est important qu'ils soient positionnés exactement de la même façon). Cette pose donne une quantité PLU=cst.r+d'+b, il faut donc lui retirer un dark. La quantité r contient les irrégularité de réponse dues au détecteur et à l'optique, et rend également compte également du vignettage de l'optique (diminution de la réponse en cos4 à partir du centre).
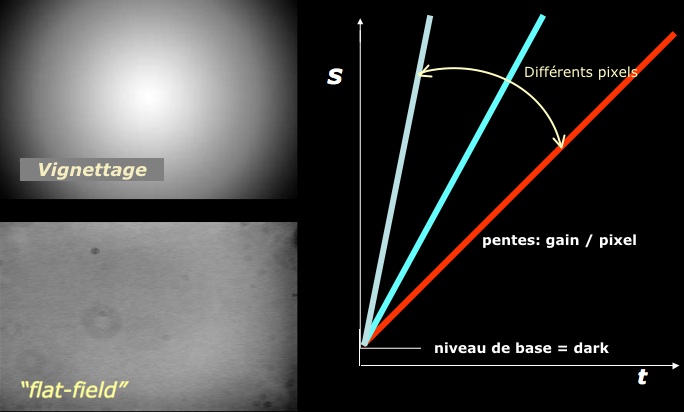 |
En bas une PLU mesurée, sur laquelle on voit les traces et poussières présentes sur le filtre ;
les variations de sensibilité (à droite) sont généralement faibles en comparaison. En haut, exemple de vignettage.
L'image calibrée est :
I(x,y) = [ S(x,y) - DarkS(x,y) ] / [ PLU(x,y) - DarkP(x,y) ]
Cette quantité est proportionnelle à l'éclairement lumineux reçu par la matrice, les irrégularités spatiales étant corrigées. On note que les deux courants d'obscurité utilisés sont a priori différents, puisque l'image et la PLU sont acquis avec des temps de pose différents.
L'incertitude relative sur le niveau mesuré est la somme quadratique des différents bruits de mesure :
[ B(I) / I ]2 = [ Bphot(I)2 + 2Blect2 + 2Btherm2 ] / [ S - D ]2 + [ Bphot(PLU)2 + 2Blect2 + 2Btherm2 ] / [ PLU - D ]2
en supposant qu'on utilise deux courants d'obscurité différents pour l'image et la PLU, et en négligeant le bruit de numérisation. Le second terme est négligeable si les PLU sont mesurées dans de bonnes conditions (avec un rapport signal sur bruit élevé), mais ce n'est pas toujours le cas.
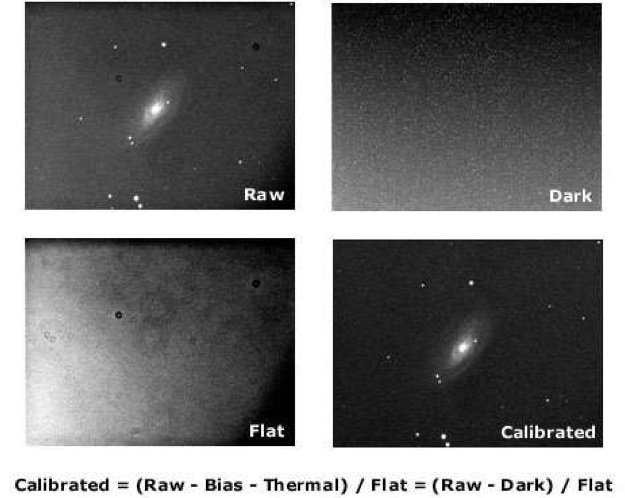 |
Exemple de calibration simple d'image CCD.
Calibration absolue
L'image calibrée est corrigée des variations spatiales : en chaque point le niveau est proportionnel au flux reçu sur la matrice. Le coefficient de proportionnalité est égal à la moyenne de la PLU divisée par le rendement quantique équivalent du CCD. Pour faire une mesure photométrique précise de l'objet, il faut également corriger de l'extinction atmosphérique. La seule méthode précise consiste à observer des étoiles de référence (connues et tabulées) dans les mêmes conditions que l'objet (proches de celui-ci), et à les utiliser pour étalonner les images :
Iabs(x,y) = I(x,y) / Iétoile(intégré) * (flux absolu étoile)
où Iétoile(intégré)
est le signal de l'étoile intégré sur toute la tache de diffraction.
Pour les objets du Système solaire,
on corrige également des distances entre le Soleil, la cible et l'observateur.
Méthodes de calibration alternatives
On préfère souvent simplifier la méthode décrite ci-dessus en faisant quelques approximations : l'important est de minimiser le bruit apporté par les corrections successives.
• Plutôt que de soustraire un vrai courant d'obscurité (mesuré) au signal, on préfère souvent soustraire la valeur moyenne du fond de ciel mesurée sur une partie de l'image elle-même, surtout si la caméra est bien refroidie. Ceci évite de rajouter le bruit thermique et le bruit de lecture une seconde fois dans le premier terme ci-dessus, et ça évite de faire les darks ; on soustrait également de cette façon la valeur du fond de ciel (lumière diffuse). Il est bon d'avoir vérifié auparavant que les darks sont uniformes quel que soit le temps de pose.
• Si fond de ciel est très lumineux mais non uniforme, on peut soustraire une image du fond de ciel acquise à côté de l'objet (observation près d'une ville, ou en IR lointain). Cette méthode a l'avantage de corriger un biais additionnel, que l'observateur ne contrôle pas. Elle permet également de ne pas mesurer les darks, mais ne réduit pas autant le bruit ajouté durant la correction. Dans cette situation, la correction du dark est plus importante que celle de la PLU.
• Si les PLU sont très lumineuses (acquises de jour), on peut ne soustraire à la PLU que l'offset mesuré Ib plutôt que le courant d'obscurité. Ceci n'est pas forcément vérifié, en particulier quand on travaille aux extrémités du domaine spectral du CCD (vers 0,3 µm ou 1 µm).
Mesure des courants d'obscurité et PLU
Les PLU doivent être faites à chaque séance d'observation, car elles évoluent avec l'orientation des filtres et les poussières sur le hublot de la caméra. Le temps d'intégration doit être suffisamment long devant le temps d'obturation pour avoir un même temps d'exposition sur toute la matrice, et suffisamment court pour que le bruit thermique soit faible – quelques secondes sont raisonnables sur le ciel. De façon générales, on cherche le signal le plus élevé possible. En principe, on moyenne une dizaine de poses pour réduire le bruit de photons dans la PLU (une méthode alternative consiste à les normaliser et à prendre la médiane point par point).
Pour les longueurs d'onde extrêmes, on fait les PLU dans la journée sur le ciel, en évitant les nuages ; pour les autres, on essaie de profiter du crépuscule. Au pire on peut utiliser une cible éclairée sur le fond de la coupole, mais d'une part l'éclairement n'est jamais uniforme, d'autre part la mise au point est différente et peut conduire à des erreurs systématiques.
Pour l'image de précharge Ib, on prend la médiane point par point de plusieurs images pour réduire le bruit de lecture. Cette quantité évolue peu au cours de la vie de la caméra, on peut prendre une valeur mesurée une fois pour toutes. Si l'offset varie peu entre les pixels, on peut utiliser une valeur constante plutôt qu'une mesure bruitée.
Pour le dark, on fait soit une acquisition pour chaque temps de pose utilisé sur l'objet, soit une série de poses de plus en plus longues — dans ce cas, on interpole ensuite point par point aux temps utilisés sur l'objet, ce qui réduit le bruit sur le dark.
Correction des petits défauts
Les images contiennent presque toujours de petits défauts, pixels anormalement sombres ou brillants. Ils peuvent être dus aux défauts de la matrice, aux fluctuations du courant thermique, ou à des rayons cosmiques intégrés pendant la pause.
On élimine les défauts ponctuels aléatoires en prenant la médiane de plusieurs images recentrées et normalisées ; cette opération réduit également le bruit de l'image (bruit "poivre et sel"). A noter que si on n'a pas de valeurs aberrantes, la moyenne point par point fournit une correction plus efficace.
Si on a peu d'images, on peut également corriger les défauts ponctuels avec une médiane locale à l'intérieur de l'image, ou avec un filtre "out-range" (on remplace dans une petite zone les valeurs aberrantes par la moyenne locale - notamment pour les pixels morts). On perd légèrement en résolution de cette façon.
Les
défauts systématiques dus à la matrice (pixels froids, colonnes ou
lignes défectueuses...) sont souvent dus à un effet de seuil et peuvent
se corriger de façon automatique en ajoutant cette valeur de seuil
préalablement étalonnée aux pixels en question.
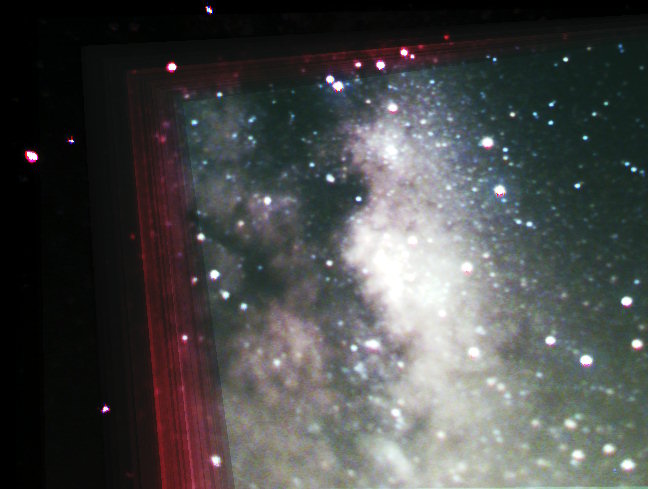
Recalage et sommation d'images
Le bruit étant minimisé au cours de l'acquisition, on peut encore augmenter le rapport signal sur bruit en sommant des images prétraitées. Ceci implique de recaler les images les unes par rapport aux autres (les "coregistrer") et d'en faire une pile, en utilisant des détails ponctuels comme repères (étoiles brillantes, cratères...). Le recalage précis des images est également indispensable pour compositer des images obtenues dans différents filtres, pour mettre en évidence les évolutions temporelles (par différences) ou pour reconstituer des mosaïques ou des cartes à partir d'images en recouvrement partiel.
Si les images sont suffisamment nombreuses (au moins 3, plutôt 5), la sommation peut être réalisée à l'aide d'une médiane plutôt qu'une moyenne : le bruit résultant est encore réduit, et les défauts cosmétiques ponctuels sont corrigés au passage. Dans le cas d'objects lumineux acquis à courts temps de pose on a souvent intérêt à ne pas sommer, mais plutôt à sélectionner les meilleures images pour conserver la meilleure résolution angulaire.
Pour compositer différents filtres, il est bon de vérifier que la dimension des images est identique : différents filtres peuvent introduire un grandissement légèrement différent. La correction de taille est délicate (de même que le redressement angulaire si la caméra a bougé) : le redimensionnement introduit souvent des artefacts très visibles, et peut interdire les mesures quantitatives.
Sur les grands télescopes, on fait ainsi couramment des séries
de 4 poses consécutives en décalant l'objet par rapport à la matrice.
Utiliser des parties différentes de la matrice permet d'éliminer
efficacement les clusters et pixels morts à l'aide d'une médiane.
 |
 |
Piles d'images recalées : redimensionnement, centrage, rotation, médiane.